-
 Видеонаблюдение
Видеонаблюдение
-
Охранно-пожарная сигнализация
-
Системы оповещения
-
Контроль доступа. СКУД
-
Турникеты
-
Шлагбаумы
-
Охрана периметра
-
Замки и доводчики
-
Домофоны и видеодомофоны
-
GSM Сигнализация
-
Источники питания
-
Программное обеспечение
-
TRASSIR
-
MACROSCOP
-
Мультимедиа
-
Тепловизоры
-
Монтажные материалы
-
Готовые комплекты
 Запрос на прайс
Запрос на прайс
 Наталья
НатальяМонтаж оборудования: 8 (495) 921-74-19
8 (916) 740-94-09
E-mail: info@infoteh-msk.ru
Часы работы: Пн-Пт 10:00 до 19:00
Адрес: 115193,г. Москва,
ул. Кожуховская 5-я, дом 9
Оценка дистанций проникновения нарушителя для охранных ПИК датчиков
Оценка разбивается на два главных этапа:
1. Построение теоретической модели диаграммы направленности (ДН) датчика на основе информации, предоставляемой производителем в технической документации.
2. Непосредственно оценка дистанций проникновения на основе полученной теоретической модели.
Рассмотрим данный метод на примере ПИК датчика с простой ДН
1) Построение теоретической модели ДН датчика
Параметры ДН, устанавливаемые производителем:
- дальность зоны обнаружения: a = 11 м;
- ширина ДН: 13,5 м;
- угол обзора ДН: 90°;
- число лучей ДН: 9;
- число зон обнаружения: 2;
- число лучей в ближней зоне: 5;
- граница ближней зоны обнаружения: 4,5-6,5 м;
- угол расхождения в вертикальной плоскости луча ДН дальней зоны: 10°;
- высота подвеса: 2 м.
Для равномерности ДН положим, что углы расхождения сегментов лучей, углы между сегментами, а также углы между лучами равны. Тогда общее число элементов ДН составит n = 35, а угол расхождения должен составлять
![]()
Дальняя зона:
Учитывая, что дальность зоны обнаружения значительно больше геометрических размеров обнаружителя, пренебрегаем его размерами, и тогда ширина сегмента луча на границе зоны обнаружения составляет:

Высота сегмента луча на границе ДН при условии, что угол расхождения в вертикальной плоскости составляет дельта бета = 10°:
![]()
Наклон сегмента луча относительно вертикали извещателя (по направлению часовой стрелки):
![]()
Ближняя зона:
Т.к. граница ближней зоны находится на расстоянии а бета = 6,5 м от вертикали обнаружителя, то ширина сегмента луча на границе ближней зоны:
![]()
Наклон сегмента луча относительно вертикали обнаружителя (по направлению часовой стрелки):
![]()
Выбирая ближнюю границу ближней зоны, равной 4,5 м от вертикали извещателя, найдем угол расхождения в вертикальной плоскости:

Тогда ДН обнаружителя будет иметь вид, представленный на рисунке 1.
2) Оценка дистанций проникновения
Согласно ГОСТ Р 50777-95 «Системы тревожной сигнализации. Часть 2. Требования к системам охранной сигнализации. Раздел 6. Пассивные оптико-электронные инфракрасные изве-щатели для закрытых помещений» модель нарушителя: человек ростом 165-180 см, весом 50-70 кг, одетый в ватные штаны, куртку стандартного образца и меховую шапку. Значит, можно считать излучающей поверхностью квадрат со стороной 0,2 м на высоте 1,72 м.
Условно поперечное направление:
Будем считать, что нарушитель пересекает ДН поперечно (фи = 0°) на расстоянии s = 5,5 м от вертикали обнаружителя.
Тогда дистанция проникновения составляет:

Промежуточное направление:
Будем считать, что нарушитель пересекает ДН под углом фи = 45°, находясь у границы дальней зоны. Тогда дистанция проникновения составляет:
Условно радиальное направление:
Будем считать, что нарушитель пересекает ДН под углом фи = 90°, т.е. по направлению на извещатель, находясь у грани-
цы дальней зоны. Тогда дистанция проникновения составляет:

Однако следует учесть, что при проведении эксперимента оказалось невозможно исключить ИК-излучение полностью, поэтому необходимо принять hH = 1 м. И тогда дельта sD =7,75м.
Данные результаты были проверены экспериментально. Результаты сравнения приведены в таблице 1.
Аналогичные расчеты и эксперименты были проведены для ПИК датчика с более развитой ДН (число зон — 4, число лучей ДН — 35). Результаты представлены в таблице 2.
Из таблиц видно, что данный метод позволяет достаточно хорошо представить дистанции проникновения, которые будут наблюдаться на практике. Очевидно, что данный метод применим только для пассивных инфракрасных датчиков. Для совмещенных ПИК+РВ датчиков такая оценка дистанций проникновения невозможна в принципе ввиду того, что производителями не раскрываются алгоритмы принятия решения о выдаче тревожного извещения.
Табл. 1
|
Направление |
Дельта sтеор, м |
Дельта sэксп, м |
Разность дельт Sтеор и Sэксп к а, % |
|
Условно поперечное |
1,13 |
1,04 |
0,7 |
|
Промежуточное |
2,2 |
2,54 |
3,1 |
|
Условно радиальное |
7,75 |
7,83 |
0,7 |
Табл. 2
|
Направление |
Дельта sтеор, м |
Дельта sэксп, м |
Разность дельт Sтеор и Sэксп к а, % |
|
Условно поперечное |
1,32 |
1,43 |
0,9 |
|
Промежуточное |
1,9 |
1,96 |
0,5 |
|
Условно радиальное |
5,8 |
5,6 |
1,7 |
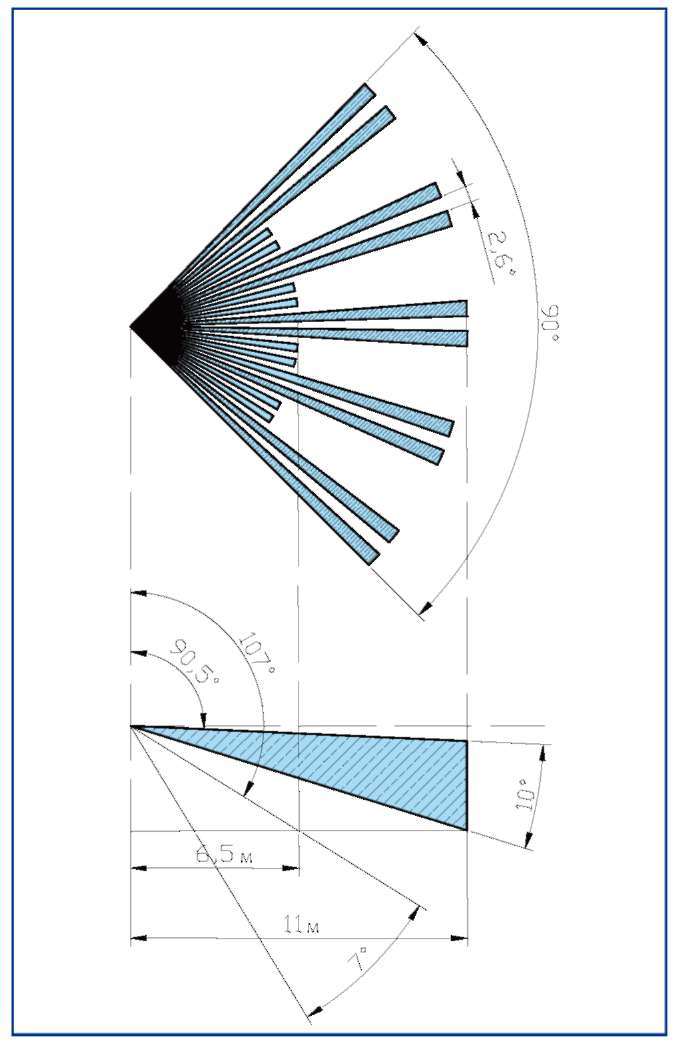
Рис. 1. Теоретическая ДН извещателя Visonic CLIP-1
 новости,
система безопасности,
новинки,
видеонаблюдения
новости,
система безопасности,
новинки,
видеонаблюдения
